
🌟 About the Project
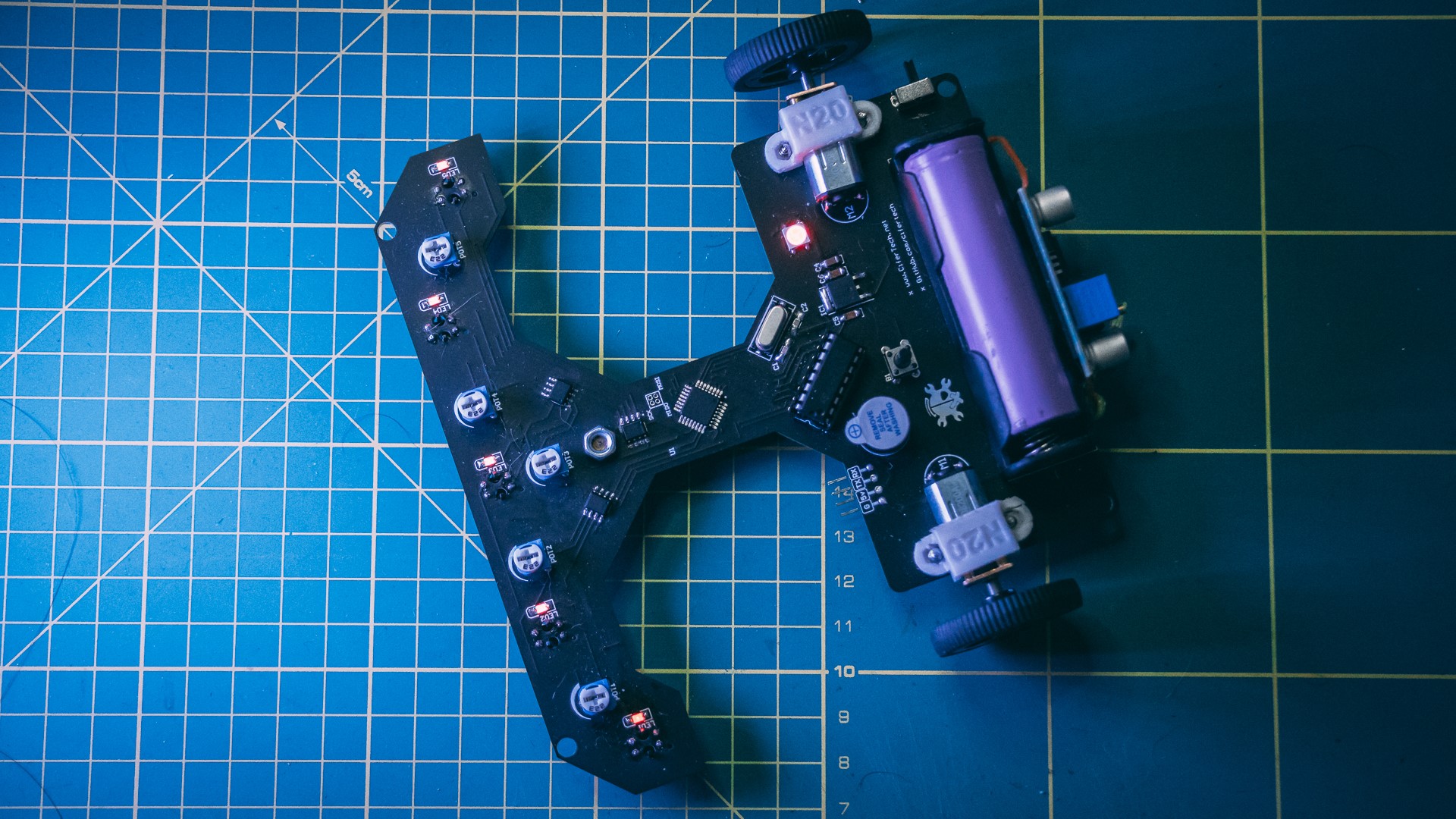
Introducing HammerHead, a simple line follower robot powered by the ATmega328 microcontroller and TCRT5000 IR sensors. This Robot is equipped with N20 motors, an L293D motor driver, and some features that make line-following an enjoyable journey.
🎯 Features
- × Advanced Line Following: With the aid of TCRT5000 IR sensors, Hammer Head excels in tracking lines efficiently, offering a delightful experience.
- × ATmega328 Brain: The brain behind this marvel, the ATmega328, orchestrates its every movement, ensuring flawless navigation.
- × Buzzer and Neopixel: It has an integrated buzzer, producing a short sound when the robot detects a line. The neopixel displays red and green lights to indicate its operational status.
- × User-Friendly Operation: A simple push button initiates or halts the robot’s movement, making it user-friendly.

 Get Started
Get Started
Step 1: Gathering Components
Collect the essential components including the ATmega328 microcontroller, TCRT5000 IR sensors, N20 motors, L293D motor driver, chassis, wheels, and battery.
Step 2: Schematic Design
Create a detailed schematic that illustrates the connection between components, ensuring accuracy and functionality.
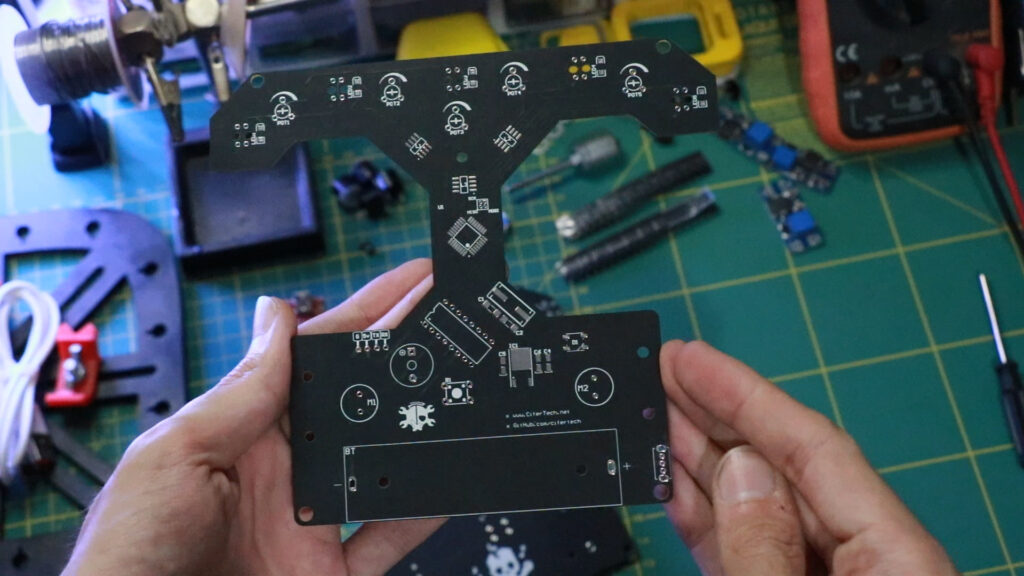
Step 3: PCB Assembly
Prepare and assemble the PCB by connecting the components, ensuring proper layout and connections.
Step 4: Power Management
As the motor driver requires 5V, integrate the MT3608 voltage booster or XL6009 for power regulation and stability.
Step 5: Coding the ATmega328
Utilize the provided code to program the ATmega328. This code enables the robot to perform basic movements and utilize sensors for line following.
Step 6: Testing and Refinement
Test the robot on various line patterns. Refine the code and robot configuration to improve its performance.
⚠ Future Changes: Adding High RPM Motors
Prepare for future enhancements by considering the inclusion of high RPM motors for increased speed and responsiveness.
![]()
Code
If you’re interested in building this project on your own, the code is available on GitHub. Simply go to the GitHub repository, and download the code.
GitHub repository: github.com/cifertech/Line-Follower
 Special Thanks to Our Sponsor: PCBWay
Special Thanks to Our Sponsor: PCBWay
No project is complete without the right tools and materials. That’s where our sponsor, PCBWay, stepped in to provide essential support for this project. PCBWay is a leading provider of high-quality printed circuit boards (PCBs) and PCB assembly services.
Website: PCBWay Official Website
Conclusion
In conclusion, the journey of creating Hammer Head, the TCRT5000-based line follower robot, has been an exhilarating exploration into the realm of robotics. Starting from the drawing board with Altium Designer to the final code implementation. Moreover, the project’s adaptability is evident in the plans for future upgrades, including the integration of high RPM motors, promising even greater capabilities and speed.